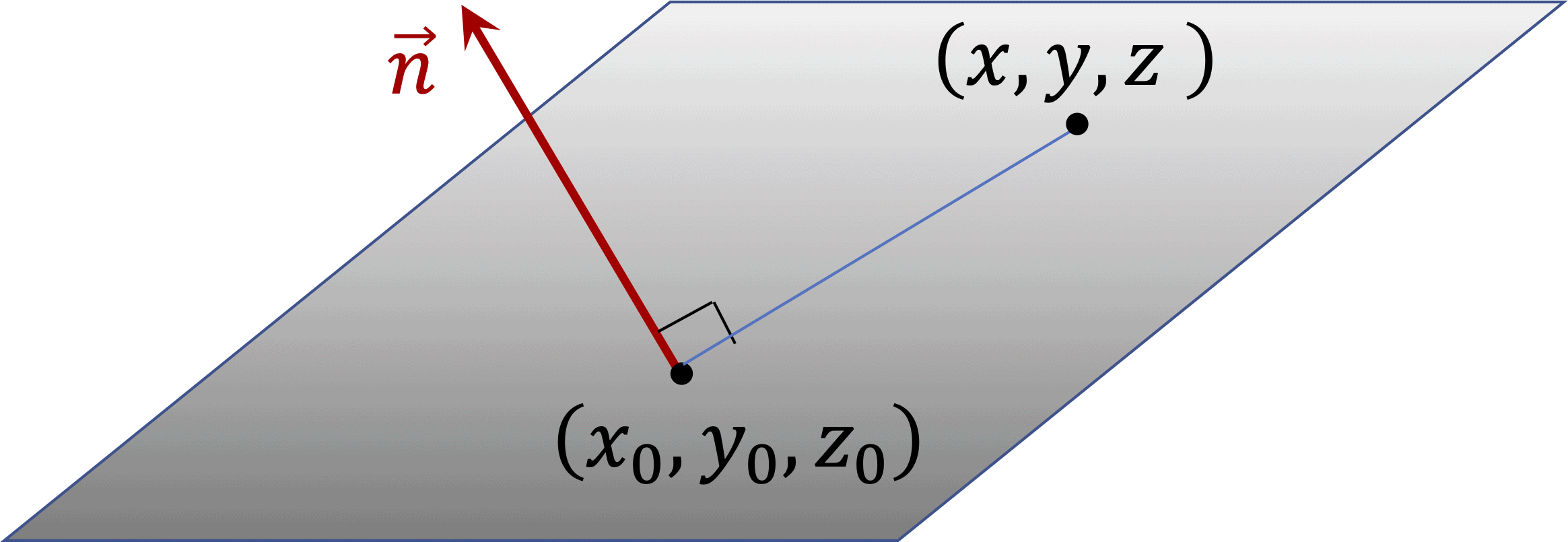
Definition 3.2.1. Scalar equation of a plane.
A plane containing a points \(P = (x_0, y_0, z_0)\) and with normal vector \(\vec{n} = \left[ a,b,c\right]^{\T}\text{,}\) satisfies the equation
\begin{equation*}
\begin{array}{lcl}
\vec{n} \cdot \vec{PQ} \amp = \amp 0,\\
\end{array}
\end{equation*}
where \(Q= (x,y,z)\) is some generic point in the plane.
This gives the scalar equation of the plane,
\begin{equation*}
\begin{array}{ccl}
\vec{n}\cdot \vec{PQ} \amp = \amp 0,\\
\left[\begin{array}{c}a\\b\\c \end{array}\right] \cdot
\left[\begin{array}{c}x-x_0\\y-y_0\\z-z_0 \end{array}\right] \amp = \amp 0,\\
a \left(x-x_0\right) + b \left(y-y_0\right) + c \left(z-z_0\right) \amp = \amp 0,\\
\end{array}
\end{equation*}